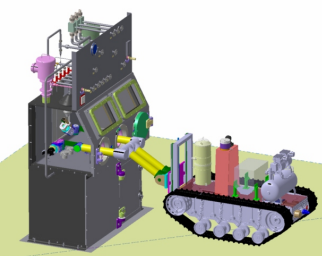
高污染密閉空間智能退役作業機器人系統
針對核設施退役、核應急響應等特殊場景,我司創新研發的第三代高污染密閉空間智能退役作業機器人系統,突破傳統人工介入作業模式,為放射性環境下狹小箱體內部去污作業提供全流程自動化解決方案。本系統集成耐輻照防護、多模態感知、智能決策等核心技術,實現在線劑量率50Gy/h環境下的可靠運行。
技術特征
系統采用模塊化雙臂冗余架構,配備高精度力-位混合控制單元,可執行箱體內壁精密打磨、高危管道激光切割、放射性粉塵真空回收、異形部件抓取轉運、防護涂層智能噴涂等全流程作業。基于ROS2架構開發的智能控制系統,支持雙臂協同遙操作與自主作業雙模式切換,末端重復定位精度達到±0.15mm。
智能移動平臺
創新設計的全向履帶式底盤(1200×600×450mm)搭載多傳感器融合導航系統,配備三維激光雷達(掃描頻率20Hz)與深度視覺相機(分辨率3840×2160),實現復雜地形下400mm障礙物動態避障能力。底盤通過性參數:***大爬坡角度35°,越障高度150mm,適應-20℃~65℃**環境。
核心性能指標
耐輻照防護:整體鉛當量≥5mmPb,關鍵部件采用碳化硼復合材料
作業靈活性:雙臂7自由度設計,單臂伸展范圍1200mm
智能決策:配備YOLOv5s改進型視覺算法,異物識別準確率≥99.3%
系統兼容性:支持IEC61131-3標準工業總線協議
本系統已通過IAEA Class III級設備認證,在秦山核電站退役工程中實現單次連續作業72小時紀錄,熱點去除效率較傳統方案提升380%,顯著降低人員受照風險。其模塊化設計支持快速更換作業模塊,可擴展應用于化工退役、生物安全實驗室去污等場景。


 在線客服
在線客服
 企業微信
企業微信




 [VIP第1年] 指數:1
[VIP第1年] 指數:1 通過認證
通過認證