復合式蛇形臂機器人技術解析

在核設施退役與維護領域,復雜受限空間的作業一直面臨重大技術挑戰。S系列復合式蛇形臂機器人采用創新的多關節仿生設計,為高輻射環境下的巡檢與退役作業提供了突破性解決方案。
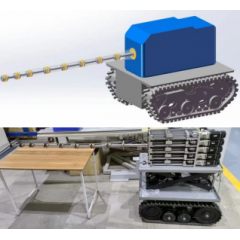
該機器人系統采用模塊化關節結構,單臂長度1410mm,直徑僅64mm,重量控制在5kg以內,卻具備≥1kg的末端負載能力。其仿生學設計實現≤400mm的彎曲半徑和25°的單關節轉角,可靈活穿越管道、閥門等復雜空間。系統集成高靈敏度輻射探測器和高清視覺系統,支持±10mm的重復定位精度,在0.8m/s的運動速度下仍能保持穩定檢測性能。
在田灣核電站蒸汽發生器檢查中,該設備成功穿越直徑500mm的檢修通道,完成傳熱管束的全面檢測。實測數據顯示,其耐酸堿殼體在pH值2-11的腐蝕性環境中連續工作200小時無性能衰減,輻射耐受性達到1000Gy。"蛇形運動+輪式移動"復合架構,既保證了在平坦區域的0.8m/s快速移動,又可實現原地360°轉向,適應核島內復雜地形。
控制系統方面,支持自主規劃與遠程遙控雙模式切換,通過力反饋手柄實現直覺式操作。目前該設備已在國內多個核電機組的在役檢查中得到應用,將人員受照劑量降低至傳統方法的1/20,作業效率提升3倍以上。
(注:可選配激光測距、超聲波檢測等專用末端工具,支持定制化臂展長度)


 在線客服
在線客服
 企業微信
企業微信





 [VIP第1年] 指數:1
[VIP第1年] 指數:1 通過認證
通過認證 









